

2026年1月、ロボデックス会場の一角。「ヒューマノイドロボット特別展示ブース」は、開演前から異様な熱気に包まれていた。
ステージ中央に静かに佇むのは、中国Unitree社の最新ヒューマノイドロボット「G1」と、大型モデル「H1」。もはやSF映画の中の存在ではない。いま、目の前にある現実の機体だ。
マイクを握ったのは、これらの日本国内代理店を務めるTechShare株式会社の担当者。彼がこのセミナーで語ったのは、華々しい未来予想図だけではない。どうやってこの複雑な機械を動かすのかという具体的な「手法」、そして今現在、開発者たちが直面している「生々しい課題」だった。
本稿では、この濃密な30分間のセミナーの全貌を、会場の空気感そのままに詳細にレポートする。
解説資料
第1章:ヒューマノイド・ウォーズ勃発。なぜ今「Unitree」なのか?
セミナーの冒頭、TechShareの登壇者は、現在のロボット業界を取り巻く狂騒的な状況を整理することから始めた。
「昨今、ネットやYouTubeを開けば、様々なメーカーがヒューマノイドロボットのアピール合戦を繰り広げています」
彼が名前を挙げたのは、業界の巨人たちだ。イーロン・マスク率いるTeslaの「Optimus」、驚異的な運動能力を見せるBoston Dynamicsの「Atlas」、OpenAIとの連携で話題をさらったFigure AIの「Figure 01」、そして家庭用への参入を狙う「Neo」など。まさに群雄割拠の時代が到来している。
しかし、TechShareはなぜ、その中で中国の「Unitree(ユニツリー)」を選んだのか?
「買える未来」としてのUnitree
登壇者は、競合他社とUnitreeの決定的な違いを強調した。
「TeslaのOptimusなどは非常に有名ですが、『いつ買えるのか?』という話になると、2025年、26年、あるいは27年……と、まだ先の話が多いのが現状です。それらは、ある程度特定の用途向けに完成されたソリューションとして提供されることを目指しています」
対して、Unitreeのスタンスは明確に異なる。
「Unitreeの最大の強みは、**『ユーザーが自由に二次開発を行える、研究開発向けプラットフォーム』**であるという点です。メーカーはロボット本体と、GitHubなどでオープンな開発環境を提供します。あとは『買ったユーザー様が、それぞれの行いたいワークに合わせてアプリケーションを開発してください』というスタンスなのです」
そして何より重要なのは、それが「今、ここにある」という事実だ。大型の「H1」は2023年末から、中型の「G1」は昨年1月からすでに出荷が始まっており、TechShare一社だけでも国内で100台以上の販売実績があるという。
これは、選ばれた一部のビッグテック企業だけでなく、大学の研究室や企業のR&D部門が、今すぐヒューマノイド開発のスタートラインに立てることを意味する。まさに「ロボット開発の民主化」の旗手、それがUnitreeなのだ。
第2章:「超多軸」の衝撃。G1の身体能力を解剖する
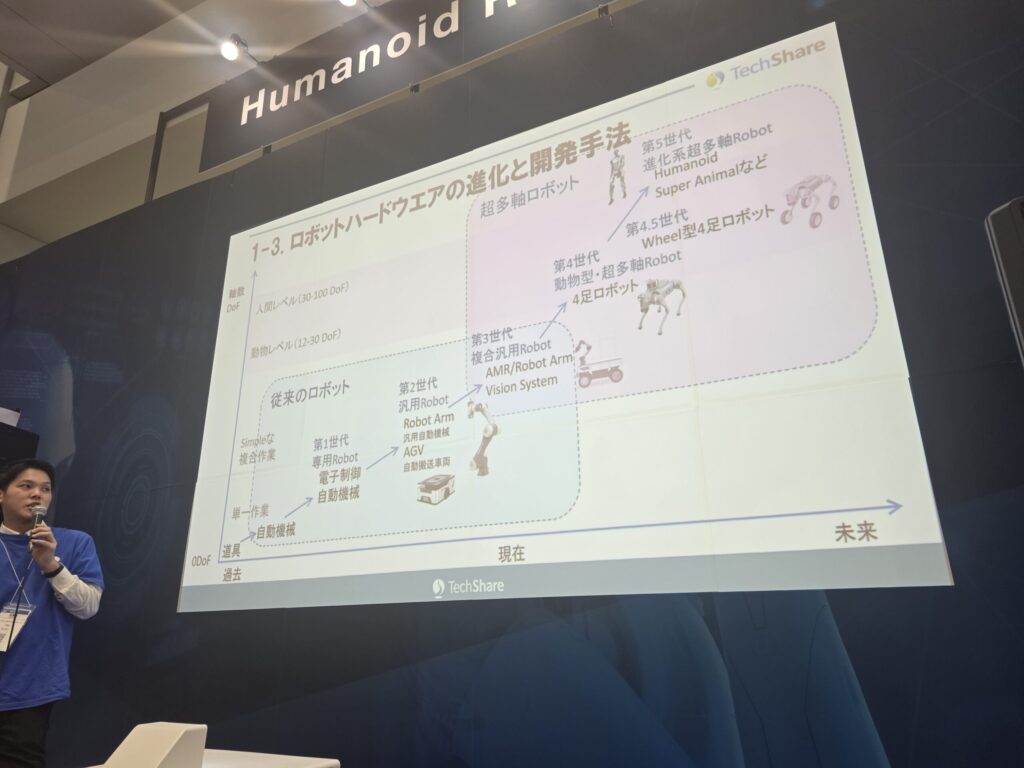
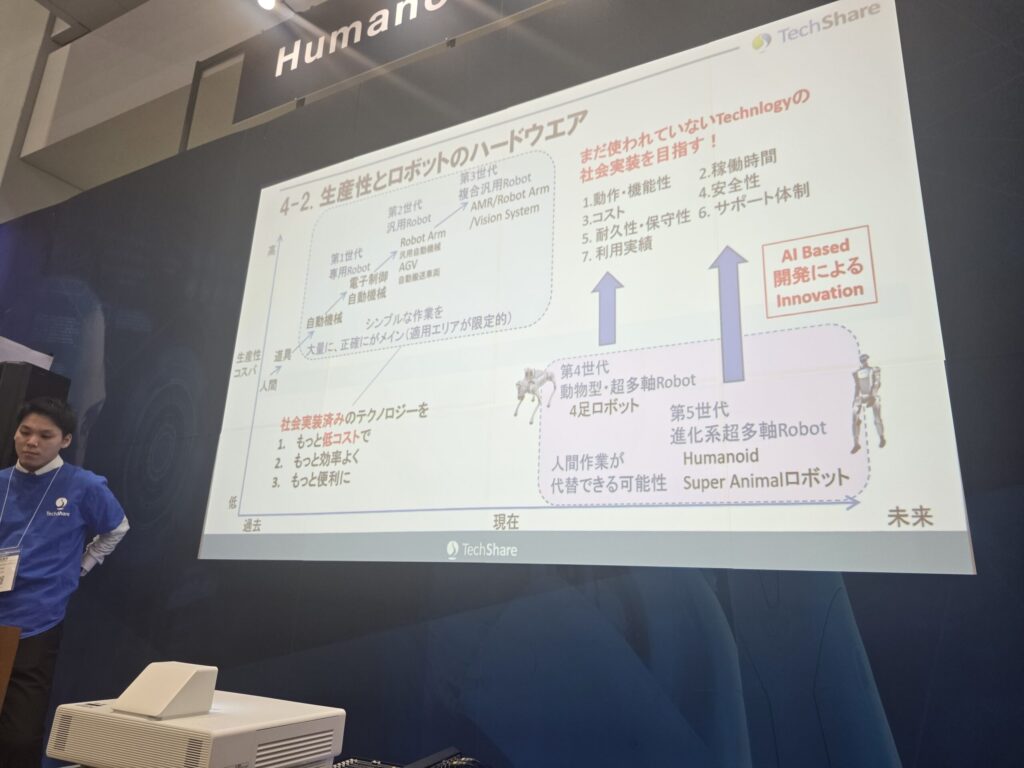
続いてスクリーンに映し出されたのは、Unitreeの製品ロードマップと、その驚くべきスペックだ。
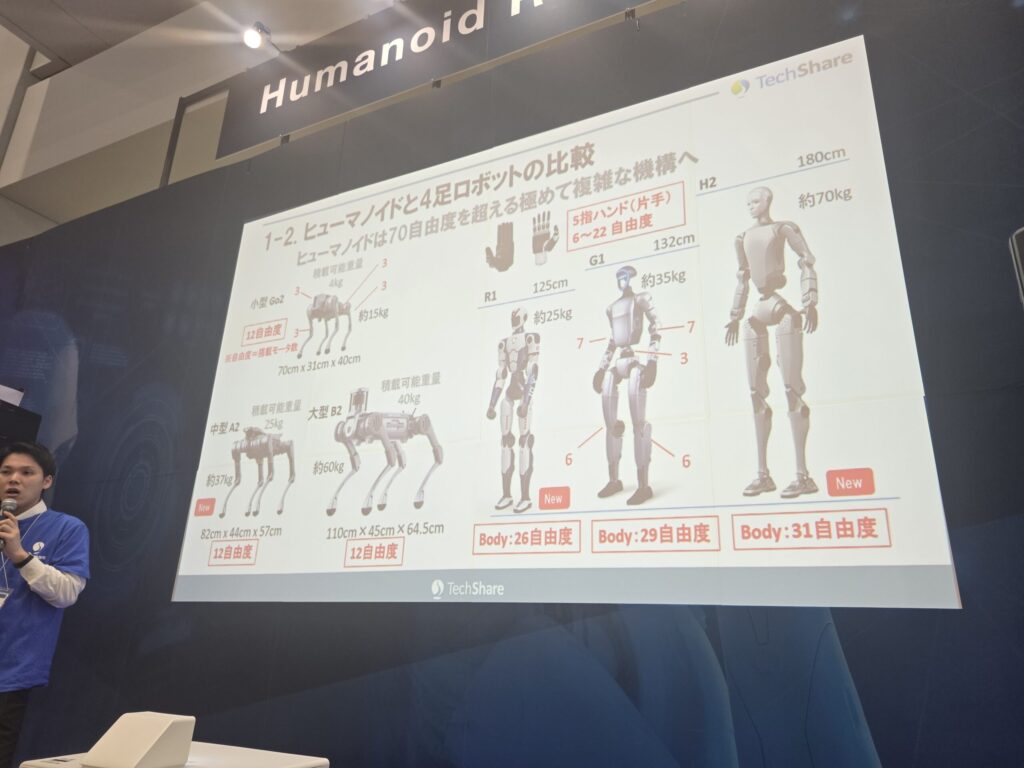
Unitreeは元々、4足歩行ロボット(犬型ロボット)で名を馳せたメーカーである。4足ロボットは1本の足に3つのモーターを持ち、合計12個のモーターを制御する。これだけでも従来の産業用ロボットに比べれば複雑だが、ヒューマノイドは次元が違う。
「41自由度」を制御する難しさ
現在販売されている中型モデル「G1」(身長約135cm)のスペックが解説された。
- 片腕: 7自由度(×2本 = 14自由度)
- 片足: 6自由度(×2本 = 12自由度)
- 腰部: 3自由度(旋回、前後屈、左右屈)
これだけで全身「29自由度」である。しかし、話はここで終わらない。ヒューマノイドにとって最も重要なパーツの一つ、「手(ハンド)」があるからだ。
「今日は実機にはダミーのハンドがついていますが、本来はオプションで3本指や5本指のハンドが用意されています。これらが持つ自由度(例えば7自由度や6自由度)を加えると、全身で約41自由度のモーターを制御することになります」
登壇者は、一般的な工場で働く産業用ロボットアームを引き合いに出した。
「産業用ロボットアームは、多くが『6軸』です。G1はその約7倍、40以上の関節を同時に、協調して動かさなければなりません。これは、従来の『この座標に、この角度で動け』というルールベースのプログラミングでは、もはや制御しきれない領域なのです」
会場のマニアックな参加者たちも、この「41自由度」という数字の重みに、改めて唸り声をあげた。これをどうやって動かすのか? ここから、セミナーの核心である「AIによる制御」の話へと移っていく。
第3章:ヒューマノイドの「脳」を作る。開発の最前線「AIアプローチ」
「では、実際にこのような超多軸ロボットを、世界中の開発者はどのように動かしているのでしょうか?」
TechShareが提示したのは、現在トレンドとなっている**「下半身と上半身を分ける」**というアプローチだ。
下半身の制御:深層強化学習(Deep Reinforcement Learning)
まずは「歩く」こと。これができなければヒューマノイドは始まらない。ここで使われるのが「深層強化学習」だ。
スクリーンには、物理シミュレーターの中で、棒人形のようなロボットが何度も転びながら、徐々に歩き方を覚えていく様子が映し出された。
「メーカーは、シミュレーション環境の中で何千体ものモデルを同時に歩かせます。そして、『一番長く歩けた個体』に報酬(ご褒美)を与え、その個体をベースに次の世代を1000体作る……これを何万回、何億回と繰り返すのです」
人間が「膝を何度曲げて、重心を前に移動して」と教えるのではない。AIが試行錯誤の末に、「転ばないための最適な関節の動かし方」を自ら編み出すのだ。こうしてシミュレーション上で鍛え上げられた「歩行モデル」を、現実の実機にデプロイ(実装)する。これを「Sim-to-Real」と呼ぶ。
「今日お持ちしているG1の実機にも、メーカーがこの手法で作った歩行モデルがデフォルトで入っています。ですから、買った直後から非常に安定した歩行が可能です。『全く動かない』という心配はありません」
上半身の制御:模倣学習(Imitation Learning)
次に、上半身の「作業」だ。歩行と違い、作業は環境が常に変化する。流れてくる部品の向きが違ったり、障害物があったりする。これを全てシミュレーションで再現するのは現実的ではない。
そこでトレンドになっているのが「模倣学習」だ。
動画では、VRゴーグルとモーションキャプチャースーツを身につけた人間のエンジニアが映し出された。彼が手を動かすと、その動きがリアルタイムでロボットに伝送され、ロボットが同じように物体を掴む。
「このように、人間が直接ロボットを遠隔操作(テレオペレーション)して、『手本』を見せます。その時のアームの軌道、関節の角度、そしてカメラが見ている画像データをセットにしてAIに学習させるのです。するとAIは、『カメラにこういう映像が映った時は、腕をこう動かせばいいんだな』ということを理解し、自律的に作業ができるようになります」
「Mobile Aloha」の衝撃と、データ収集の民主化
登壇者は、この模倣学習がここ数年で急速にホットになった背景として、スタンフォード大学の学生による論文「Mobile Aloha」の事例を紹介した。
「それまで、模倣学習のためのデータ収集には、高額な専用機材が必要だったり、一つの動作を覚えさせるのに数千回のデータ取りが必要だったりと、ハードルが高いものでした。しかし、Mobile Alohaは、安価なロボットアームと市販のカメラを組み合わせ、わずか50回程度の手本を見せるだけで、複雑な料理などのタスクを学習できることを証明したのです」
これをきっかけに、「安価なデバイスで、少ない回数で教える」研究が一気に加速した。
現在では、VRゴーグル(Meta QuestやPICOなど)のコントローラーでロボットの手先を操作したり、TechShareが取り扱う「モーションキャプチャーグローブ(Manusなど)」を装着して、人間の指の動きをそのままロボットハンドに反映させたりと、データ収集の手法も多様化している。
「最近の論文では、VRゴーグルを装着した人間がロボットを操作し、下半身の移動と上半身の作業を同時に教え込む、といったハイブリッドな手法も研究されています。何が正解というものはまだありませんが、まさに今、世界中で様々なアプローチが試されているのです」
第4章:熱狂の裏側にある「冷徹な現実」。今、何が課題なのか?
セミナーの終盤、登壇者はあえてトーンを落とし、ヒューマノイドロボットが抱える「現実的な課題」について、包み隠さず語り始めた。夢物語だけで終わらせない、代理店としての誠実な姿勢が垣間見えた瞬間だった。
「ここまで、いいことばかり話してきましたが、今日時点でヒューマノイドがすぐに工場のラインで人間の代わりに働けるかというと、まだまだ課題は山積みです」
彼が挙げた主な課題は以下の3点だ。
1. 稼働時間という「壁」
「最大の課題はバッテリーです。G1は脇の下あたりにバッテリーが入っていますが、何もせずにただ立っているだけでも約2時間。実際に腕や足を動かして作業をさせると、我々の体感では**『約1時間』**程度しか持ちません」
1時間働いて、バッテリー交換のために休憩する。これでは、人間よりも生産性が高いとは到底言えない。今のバッテリー技術の限界が、ロボットの社会実装を阻む大きな壁となっている。
2. 安全性という「リスク」
次に、安全性だ。産業用ロボットには、人が近づいたら止まるセンサーや、緊急停止ボタンが義務付けられている。しかし、研究開発用プラットフォームであるG1には、それらがない。
「デフォルトでは、人が目の前にいても進み続けますし、壁があってもぶつかり続けます。もちろん、カメラやLiDARを使って避ける機能を開発することは可能ですが、それはユーザーが実装しなければなりません」
さらに深刻なのは、転倒リスクだ。
「非常停止ボタンもありません。仮に、暴走を止めるためにモーターの電源を切るコマンドを送ったとします。すると何が起きるか? この子はバランス制御を失い、その場で崩れ落ちます。135cm、35kgの金属の塊が倒れてくる。二次被害や、高額な本体の破損のリスクは常に付きまといます」
そのため、開発現場では天井から安全帯で吊るしたり、専用のスタンドに固定したりといった対策が必須となる。
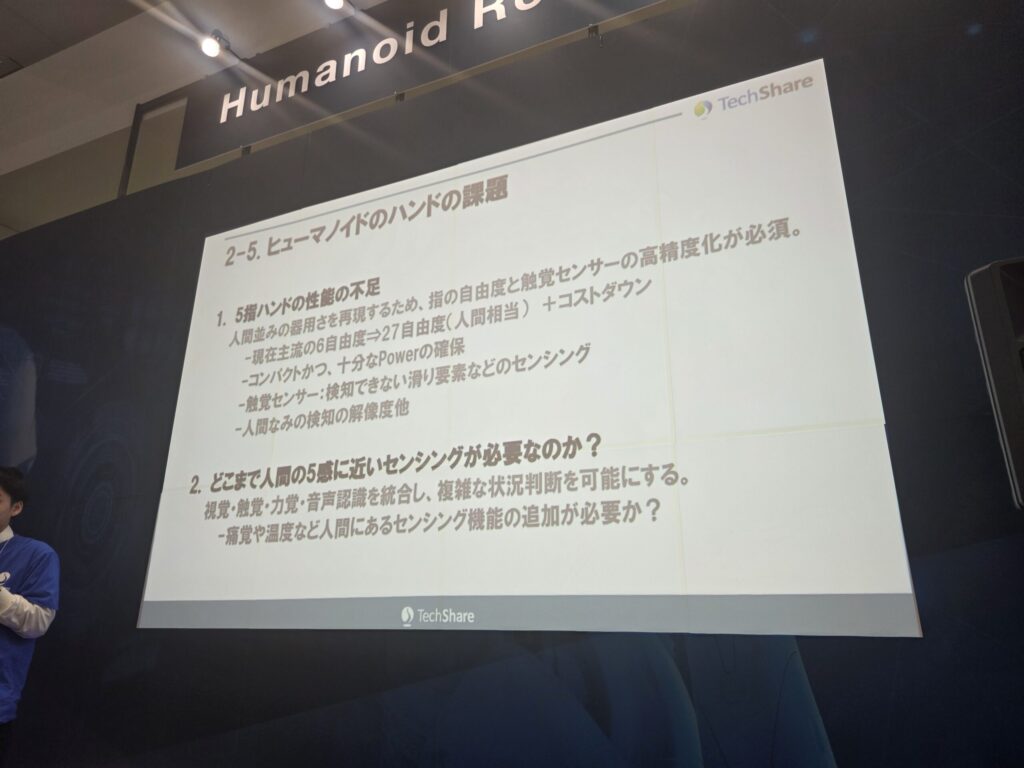
3. 「手(ハンド)」の未成熟
最後に、作業の要となる「ハンド」の課題だ。
「イーロン・マスクも言っていましたが、ヒューマノイドの課題は『繊細なセンシング』にあります。現在のG1のオプションハンドは、グーパーの動きと親指の動き程度しかできず、細かい関節の横の動きなどがありません。本当に大雑把に『つまむ』程度の動きしかできないのです」
人間のように複雑な関節を持ち、触覚センサーが張り巡らされたハンドも研究されてはいるが、非常に高額になったり、大型化してG1の腕に取り付けられなかったりと、実用化にはまだ遠い。
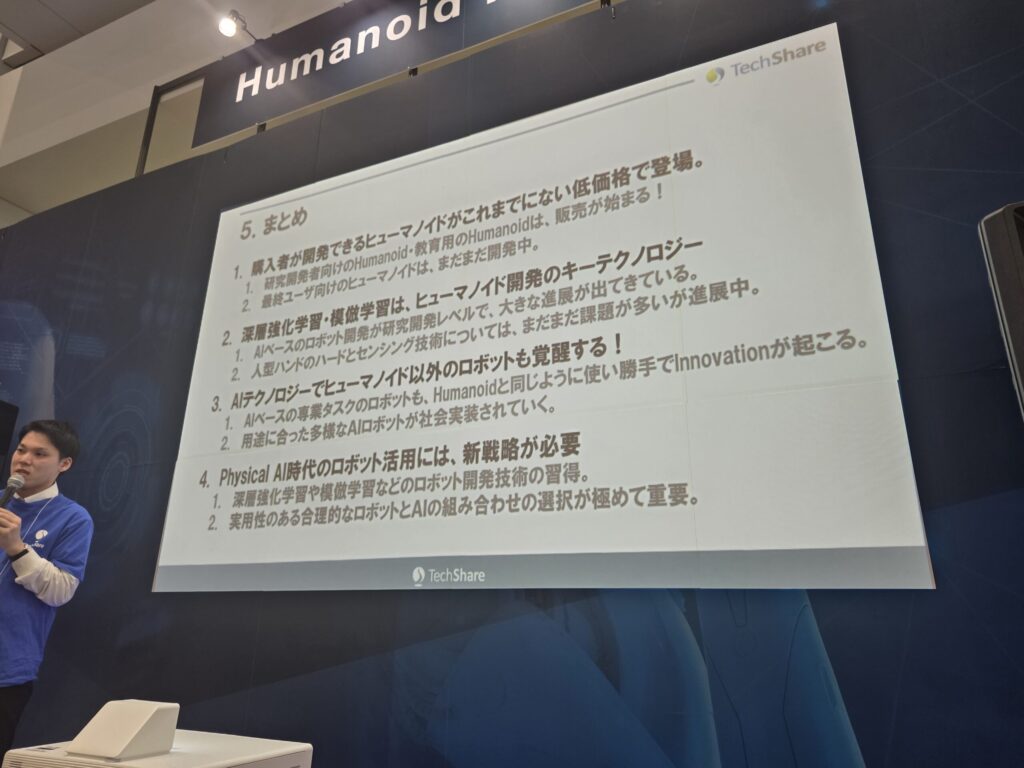
第5章:結論。それでも私たちが「今」ヒューマノイドに挑む理由
「少しネガティブな話が多くなってしまいましたが……」
登壇者は最後に、再び力強く会場に語りかけた。
「我々は決してヒューマノイドを諦めているわけではありません。むしろ、これほど安価で、オープンな開発環境が提供されている製品が出てきたことに、大きな可能性を感じています」
一昔前、ヒューマノイド開発は、ホンダのASIMOのように選ばれた大企業の、選ばれたエンジニアにしか許されない聖域だった。今も、Teslaのようなビッグテックでなければ触れない領域はある。
「しかしUnitreeは違います。誰でも買えて、誰でも触れる。世界中の多様なエンジニアが、様々な用途を見据えて研究開発に参加できる。これが今のヒューマノイド開発の面白いところなのです」
そして彼は、たとえヒューマノイドの実用化がまだ先だとしても、「今、この技術に取り組むこと」の重要性を強調した。
「深層強化学習や模倣学習といったAIベースのロボット開発手法は、間違いなくこれからのキーテクノロジーになります。もしヒューマノイドが上手くいかなかったとしても、ここで得た知見は、既存の産業用ロボットアームや協働ロボットをより賢く動かすために必ず役立ちます」
従来のルールベースのプログラミングではなく、AIに「動きを教える」技術。それを今のうちから習得しておくことが、将来の製造現場を変革する力になる。
「ぜひ、このオープンなヒューマノイドロボットを使って、皆様と一緒に、より良い社会、新しいロボットの未来を作っていければと考えています」
30分間の濃密なセッションは、会場からの熱い拍手とともに幕を閉じた。ステージ上のG1は、まるで自らの出番を静かに待っているかのように、その銀色の機体を輝かせていた。







