

2026年1月、東京ビッグサイト・ロボデックス2026。TechShare株式会社が開催した「Unitree G1/H1 ヒューマノイドロボット特別展示セミナー」を現地取材。41自由度の制御哲学・深層強化学習(Sim-to-Real)・模倣学習・そして現実の3つの課題——30分間の濃密なセミナーを完全レポートする。
2026年1月、東京ビッグサイトで開催されたロボデックス(ROBODEX)2026。日本最大級のロボット専門展示会に今年新設された「ヒューマノイドロボット特別展示ブース」は、開演前から異様な熱気に包まれていた。ステージ中央に静かに佇むのは、中国Unitree(ユニツリー)社の最新ヒューマノイドロボット「G1」と大型モデル「H1」。もはやSF映画の中の存在ではない——いま、目の前にある現実の機体だ。登壇したのはUnitreeの国内正規代理店・TechShare株式会社の担当者。30分間のセミナーは、技術的に深い内容でありながら、会場の全員が聞き入る圧倒的な密度を持っていた。本レポートでは、そのセミナーの全内容を体系的に整理し、ヒューマノイドロボットのAI制御技術の現在地を解説する。
この記事の3行サマリー
- Unitree G1は「今すぐ買えてオープンに開発できる」唯一のヒューマノイド——TeslaやBostonDynamicsが「将来」を語る中、国内代理店TechShare一社だけで100台超の販売実績を持つ「ロボット開発の民主化プラットフォーム」だ
- 「下半身=深層強化学習(Sim-to-Real)」「上半身=模倣学習(テレオペレーション)」という二層制御アーキテクチャが2026年のヒューマノイド開発の世界標準アプローチになっている
- バッテリー約1時間・非常停止なし・ハンド未成熟——現実の3つの課題を代理店が包み隠さず語った。それでも「今取り組むことに意味がある」理由とは何か
1. TechShare株式会社とは——Unitree国内代理店が語る開発の最前線
TechShare株式会社は、Unitreeロボティクス製品の日本国内における正規代理店であり、G1・H1を含むヒューマノイドロボットの販売・サポート・導入コンサルティングを行っている。同社はロボットハードウェアの販売にとどまらず、開発環境の整備・テレオペレーションデバイス(VRゴーグルやモーションキャプチャーグローブ)の取り扱いまでを手がけており、日本市場におけるヒューマノイド開発エコシステムの中核的存在だ。東京都江東区に拠点を置き、Unitree製品の技術サポートから2次開発支援まで一貫して担当している。
Unitree Robotics(宇樹科技)は2016年に中国・杭州で設立され、CEO Wang Xingxing氏のもとで急成長を遂げたロボティクス企業だ。特許出願200件以上、認可180件以上という技術力を背景に、Go2やB2などの四足歩行ロボットで市場を開拓。2023年にはH1ヒューマノイドを発売し、2024年にG1で小型・低価格路線を確立した。2026年に入ってからは上海証券取引所へのIPO申請、Amazon USでの販売開始、VLAモデルのオープンソース化など、事業拡大を加速させている。
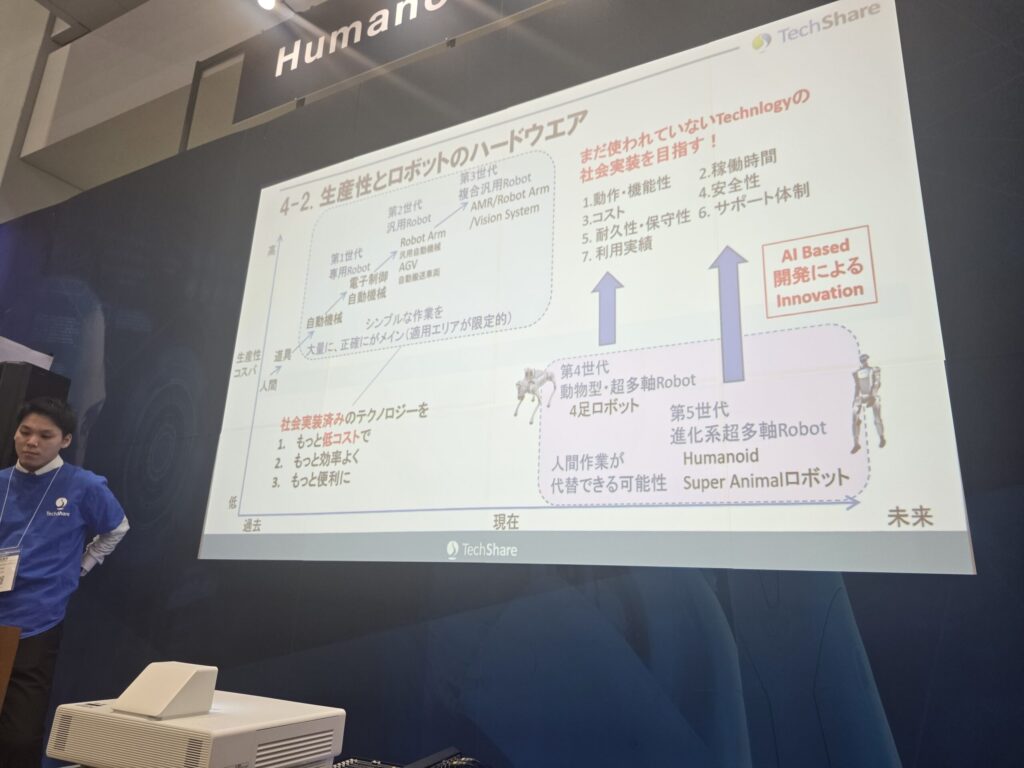
2. なぜ今「ヒューマノイドロボット」なのか——群雄割拠の業界地図と市場規模
2024〜2026年のヒューマノイドロボット市場は「群雄割拠」という言葉がぴったりだ。TeslaのOptimus(オプティマス)は量産を目指し工場での試験投入を開始。Boston DynamicsのAtlasは電動化・オープン開発版が登場。Figure AIの「Figure 02」、Agility RoboticsのDigit、1X TechnologiesのNEOなど——多様なプレイヤーが一斉にヒューマノイド開発に参入している。Goldman Sachsの調査によると、ヒューマノイドロボット市場は2035年までに最大1,540億ドル規模に達する可能性があるとされる。
なぜこれほど多くの企業がヒューマノイドロボットに集中投資するのか。その背景には3つの構造変化がある。第一に労働力不足の深刻化——日本をはじめとする先進国の少子高齢化が製造業・物流業・介護業の人手不足を加速させている。第二に工場や物流施設の自動化需要——人間が使うことを前提に設計された既存インフラをそのまま活用できるヒューマノイドへの期待は大きい。第三に大規模言語モデル(LLM)の発展による「ロボットの知能化コストの急激な低下」——Vision-Language-Actionモデル(VLA)の登場により、ロボットが「見て・理解して・動く」ための開発コストが劇的に下がった。
3. Unitreeが選ばれる理由——「買えて・触れる・開発できる」民主化プラットフォーム
「TeslaのOptimusなどは『いつ買えるのか?』という話になると、2025年、26年、27年……とまだ先の話が多い。対してUnitreeの最大の強みは、『ユーザーが自由に二次開発を行える、研究開発向けプラットフォーム』であるという点です。大型の『H1』は2023年末から、中型の『G1』は2025年1月から出荷が始まっており、弊社一社だけで国内100台以上の販売実績があります」
TechShare株式会社 登壇者 — ロボデックス2026セミナー
世界中のヒューマノイドロボットを見渡したとき、Unitreeの立ち位置は極めて特殊だ。Tesla・Boston Dynamics・Figure AIなどの製品は、現時点では一般販売が限定的であるか、特定の大企業・研究機関向けに限られている。一方でUnitreeは、G1 EDUモデルを「オープンな研究開発プラットフォーム」として一般販売しており、大学の研究室・スタートアップ・大企業のR&D部門が即座に購入して開発を始められる。
価格面でも圧倒的な優位性がある。H1は約1,580万円(国内正規品)、G1は標準モデルが約$13,500 USD(約200万円)から、EDU版(研究開発用)は最上位のR&D Ultimateモデルで43自由度まで拡張可能だ。かつてヒューマノイド開発は、ホンダのASIMOのように選ばれた大企業の、多大な開発予算を持つ特定のエンジニアにしか許されない聖域だった。しかしUnitreeのG1は研究開発向けモデルが数百万円台から入手できる。TechShare社が100台超という数字を国内一社で達成していることは、この「民主化」の説得力を如実に示している。
4. 41自由度の衝撃——産業用ロボット「6軸」との圧倒的な違い
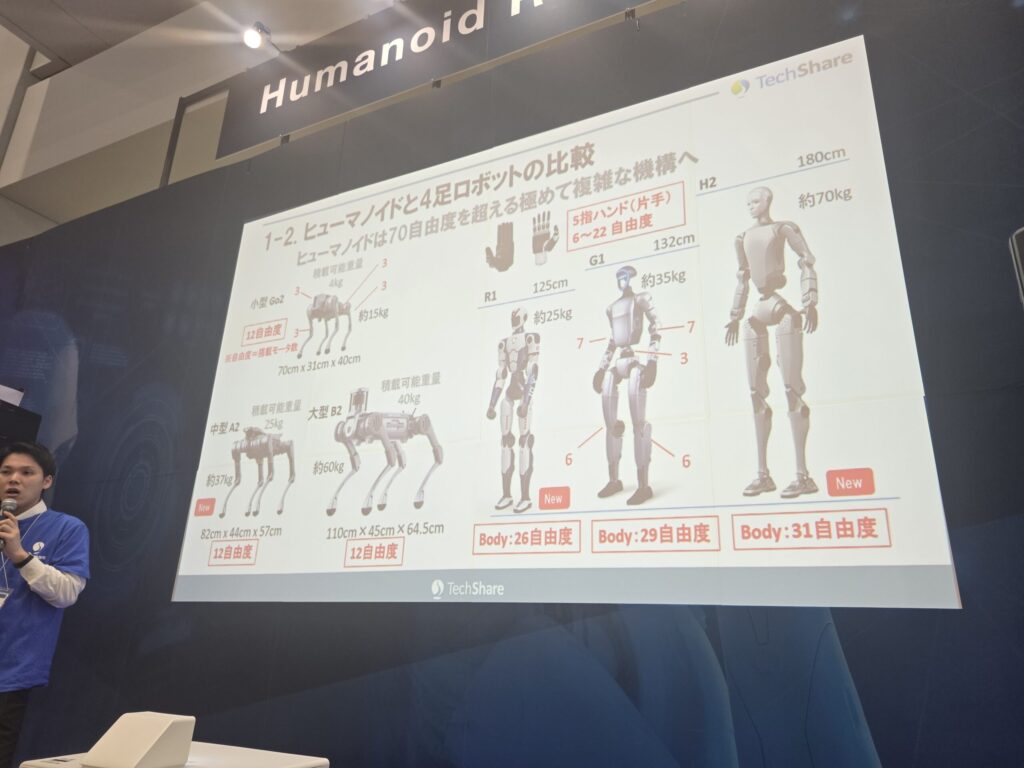
Unitree G1の主要スペックを整理する。身長は約127cm(H1は約180cm)、重量は約35kg(H1は約47kg)、最大自由度は43(ハンド込み・EDU Ultimate版)だ。
| 部位 | 自由度 | 備考 |
|---|---|---|
| 片腕 | 7 | ×2本=上半身14自由度 |
| 片足 | 6 | ×2本=下半身12自由度 |
| 腰部 | 3 | 旋回・前後屈・左右屈 |
| ハンド(Dex3-1、オプション) | 各7(3指) | ×2本=14自由度、マルチタッチアレイセンサー搭載 |
| 全身(ハンド込み・最大) | 約43 | 産業用ロボットアーム「6軸」の約7倍 |
「産業用ロボットアームは、多くが『6軸』です。G1はその約7倍、40以上の関節を同時に、協調して動かさなければなりません。これは、従来の『この座標に、この角度で動け』というルールベースのプログラミングでは、もはや制御しきれない領域なのです」
TechShare株式会社 登壇者
産業用ロボットアームが6軸(関節)で制御される理由は、「ある点から別の点へ、決まった経路で決まった動きをさせる」という用途に特化しているからだ。しかしヒューマノイドは根本的に異なる。G1の「43自由度(最大)」とは、腕・足・胴体・首・指先に至るまで、全身の40以上の関節が同時に連動して動くということだ。
人間が「歩く」という動作ひとつ取っても、腰・膝・足首・足指の関節が精妙に連携し、重心を常に支持多角形の内側に保ちながら前進している。これを「右膝を35度曲げて、同時に左足首を○度傾けて……」とルールベースで記述することは現実的ではない。さらにヒューマノイドは「予測不可能な環境」で動く必要がある。段差の高さが違う・床が滑る・見知らぬ障害物がある——こうした「環境の不確実性」への対応こそが、AIによる制御が不可欠な理由だ。G1の制御システムには力・位置ハイブリッド制御とデュアルエンコーダシステムが搭載されており、各関節の精密な力制御を実現している。
5. 深層強化学習(Sim-to-Real)——下半身の歩行AIをゼロから作る
TechShareが提示した「ヒューマノイドのAI制御アーキテクチャ」の第一の柱が、深層強化学習(Deep Reinforcement Learning)を使ったSim-to-Realだ。これは主に「下半身の歩行制御」に使われるアプローチだ。
深層強化学習の仕組み——「転ばなければ報酬をもらえる」
「メーカーは、シミュレーション環境の中で何千体ものモデルを同時に歩かせます。そして、『一番長く歩けた個体』に報酬を与え、その個体をベースに次の世代を1000体作る……これを何万回、何億回と繰り返すのです。人間が『膝を何度曲げて』と教えるのではなく、AIが試行錯誤の末に、『転ばないための最適な関節の動かし方』を自ら編み出す」
TechShare株式会社 登壇者——Sim-to-Realによる歩行モデルの生成
深層強化学習とは、エージェント(この場合はロボットのモデル)が環境の中で行動し、その結果として得られる「報酬(Reward)」を最大化するように学習するAI手法だ。ヒューマノイドの歩行学習では、シミュレーター(Isaac SimやMuJoCoなど物理エンジンを内蔵した仮想環境)の中で、何千体もの仮想ロボットが同時に動き始める。各ロボットは最初、全くランダムに関節を動かす。当然、ほぼ全員が即座に転倒する。しかし「少しだけ長く立っていられた個体」には正の報酬が与えられ、そのパラメータを引き継いだ次世代モデルが生成される。この「選択と複製」を何百万回と繰り返すことで、徐々に「安定して歩き続けられる」モデルが進化する。
Sim-to-Realの核心——シミュレーションの物理を現実に合わせる「ドメインランダマイゼーション」
シミュレーターの物理モデルは、どれほど精密でも現実の物理とは完全には一致しない。シミュレーターで完璧に歩けるモデルを実機に移植(デプロイ)すると、わずかな物理的差異が累積してロボットが転倒することがある。これを「Sim-to-Realギャップ」と呼ぶ。
このギャップを埋める手法として「ドメインランダマイゼーション(Domain Randomization)」が使われる。シミュレーション中に床の摩擦係数・ロボットの重量・関節の剛性などを意図的にランダムに変化させ、「ノイズのある環境」でも安定して歩けるモデルを鍛える。「今日お持ちしているG1の実機にも、メーカーがこの手法で作った歩行モデルがデフォルトで入っています」——TechShareの担当者はそう語った。現在のG1がなめらかに歩き、段差を乗り越え、後退し、側転に近い動作さえできる背景には、何億回ものシミュレーション学習が積み重なっている。
6. 模倣学習(テレオペレーション)——上半身の作業AIをデータで教える
歩行と異なり、上半身の「作業」はより複雑な問題を持つ。流れてくる部品の向きは毎回異なり、箱の重さもバラバラで、障害物の配置も変化する。これら全てのバリエーションをシミュレーションで再現することは事実上不可能だ。そこで上半身の制御にトレンドになっているのが「模倣学習(Imitation Learning)」だ。
テレオペレーションによるデータ収集の実際——「状態・視覚・行動」の三位一体
「VRゴーグルとモーションキャプチャーを身につけた人間のエンジニアが手を動かすと、その動きがリアルタイムでロボットに伝送され、ロボットが同じように物体を掴む。その時のアームの軌道・各関節の角度・そしてカメラが見ている画像データをセットにしてAIに学習させるのです。人間が『見本を見せる』ことで、ロボットはその動き方のパターンを学ぶ」
TechShare株式会社 登壇者——テレオペレーションによるデモンストレーションデータ収集
テレオペレーション(遠隔操作)によるデータ収集では、VRゴーグルのコントローラーやモーションキャプチャーグローブを装着した人間がロボットを遠隔操作し、目標タスクを実演する。このとき記録されるのは「状態データ(各関節の角度・角速度・トルク値)」「視覚データ(ロボットのカメラ映像)」「行動データ(各関節への制御指令)」の三位一体だ。この「状態・視覚・行動データセット」を何十〜何百セッション分収集し、AIモデルに「この状況では、この動作をすればよい」というパターンを学習させる。TechShare社はVRゴーグルやモーションキャプチャーグローブといったテレオペレーションデバイスも取り扱っており、G1と組み合わせた模倣学習環境をワンストップで構築できる。
7. Mobile Alohaの衝撃——50回の手本でブレークスルーが起きた
「スタンフォード大学の学生たちが、安価なロボットアームと市販のカメラを組み合わせ、わずか50回程度の手本を見せるだけで、複雑な料理などのタスクを学習できることを証明したのです。これが大きな衝撃を与えました。『少ない回数で、安価なデバイスで教える』研究が一気に加速した転換点でした」
TechShare株式会社 登壇者——Mobile Alohaが変えたデータ収集の常識
2024年に発表されたMobile Alohaは、1台約3万2千ドルという比較的低価格のロボットプラットフォームを使い、料理・掃除・ドア開閉などの複雑なタスクを「50デモンストレーション(手本)」で学習できることを示した。従来の常識では、このような複雑なタスクには何千・何万回ものデモが必要と考えられていた。
Mobile Alohaが明らかにしたことは二つある。一つは「少ないデータでも高品質なデモがあれば学習できる」という質的効率性。もう一つは「高額な専門装置がなくても、VRゴーグルや市販のカメラでデータ収集が可能だ」というアクセシビリティの向上だ。この研究をきっかけに、世界中の研究機関・スタートアップが低コストのテレオペレーションシステムを開発し始めた。
「下半身=深層強化学習(Sim-to-Real)」「上半身=模倣学習(テレオペレーション)」——この二層制御アーキテクチャが、2026年のヒューマノイドロボット開発における世界標準のアプローチだ。どちらも「人間が全ての動作をプログラムする」従来のロボット制御から、「AIが自らデータから学ぶ」パラダイムシフトを体現している。Unitreeはこの両アプローチを統合した「UnifoLM(Unitree Robot Unified Large Model)」を開発中であり、ロボット工学の新しい知能化時代の創出を目指している。
8. 現実の3つの課題——バッテリー・安全性・ハンドの未成熟
セミナーの後半、TechShareの登壇者は突然トーンを落とし、こう切り出した。「ここまで、いいことばかり話してきましたが……今日時点でヒューマノイドがすぐに工場のラインで人間の代わりに働けるかというと、まだまだ課題は山積みです」。この誠実さが、会場の信頼をむしろ高めた瞬間だった。
課題1:稼働時間「約1時間」の壁——人間の労働時間には程遠い
G1は何もせずに立っているだけの状態で約2時間のバッテリー持続時間だが、実際に腕や足を動かして作業させると体感で「約1時間」程度しか持たない。1時間働いてバッテリー交換のために休憩する——これでは人間の労働時間(通常8時間)をカバーできず、生産性の面で人間に優位とは言えない。バッテリー容量の増大・消費電力の最適化は、ヒューマノイド実用化の最重要課題のひとつだ。解決策として研究されているのは、交換式バッテリーパックの高速交換システム、有線電力供給との併用、エネルギー回生機構の改善などだ。
課題2:非常停止が「崩落」を意味する安全性の問題——135kg・35kgの金属が突然倒れる
G1のデフォルト状態では、障害物検知機能がなく、人間が目の前にいても壁があっても進み続ける。さらに深刻なのは「止め方」の問題だ。暴走を止めるためにモーター電源を切ると、バランス制御を失ったG1はその場で崩れ落ちる。127cm・35kgの金属の塊が突然倒れてくる危険性がある。現場では天井からの安全帯(ハーネス)や専用スタンドへの固定が必須だ。産業現場での実用化には、人検知センサー(LiDARや深度カメラとの統合)・安全カーテン・フェールセーフな緊急停止機構(倒れる前にその場でしゃがむ「ソフトフォール」機能など)の整備が欠かせない。
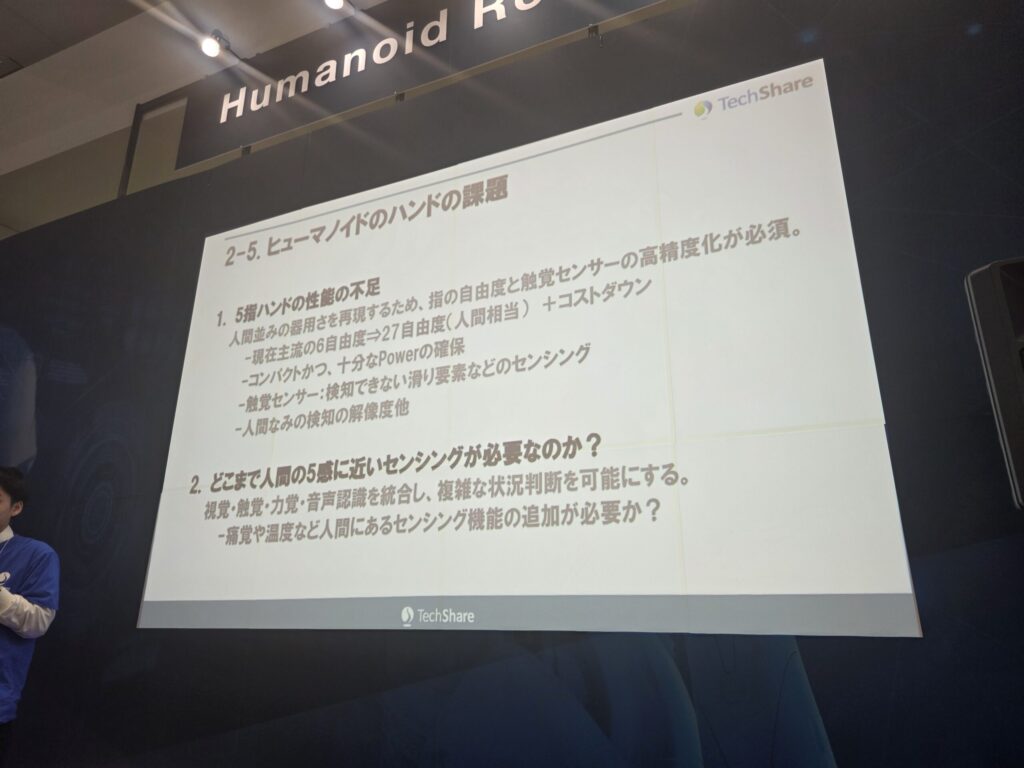
課題3:ハンド(手)の未成熟——「つまむ」しかできない現実
現在のG1のオプションハンド(Dex3-1)は3指・7自由度でマルチタッチアレイセンサーを搭載しているものの、グーパーの動きと親指の動き程度しかなく、人間の手のような指の横方向の動き・個別の指の力加減・繊細なピンチグリップには対応していない。本当に大雑把に「つまむ」程度の動きしかできないのが現状だ。人間が日常的に行う「卵を割らずに持つ」「薄い紙を1枚だけ取る」といった作業は、現在のハンド技術では非常に困難だ。イーロン・マスクもヒューマノイド最大の課題として「繊細なセンシング(触覚センサー)の不足」を挙げており、この点はUnitreeに限らずヒューマノイド業界全体が取り組む共通課題だ。
9. それでも「今」挑む理由——ヒューマノイドは汎用ロボットへの布石
「深層強化学習や模倣学習といったAIベースのロボット開発手法は、間違いなくこれからのキーテクノロジーになります。もしヒューマノイドが上手くいかなかったとしても、ここで得た知見——シミュレーションで歩行を学習させるSim-to-Real・テレオペレーションでデータを収集する模倣学習——は、既存の産業用ロボットアームや協働ロボットをより賢く動かすために必ず役立ちます」
TechShare株式会社 登壇者——「今の投資は確実にリターンする」
深層強化学習によって「不確実な環境でも転ばずに動き続ける」という能力は、工場の協働ロボット・物流施設のAMR(自律移動ロボット)・介護施設のアシストロボットにも応用できる。模倣学習によって「人間が50回手本を見せるだけで新しい作業を覚える」という能力は、製造業における「段取り替えの時間短縮」という長年の課題を解決するポテンシャルを持つ。
ヒューマノイドロボットの開発は、ロボット工学・AI・制御理論・センサー工学の「集大成」だ。ここで培われる技術は、ヒューマノイドという形を超えて、ロボティクス全体を進化させる普遍的な資産になる。「今すぐ始める」が最大の競争優位となる理由がここにある。深層強化学習・模倣学習の知見は蓄積に時間がかかる。1年の先行は将来3年の差になり得る。
30分間のセミナーは、会場からの熱い拍手とともに幕を閉じた。ステージ上のG1は、まるで自らの出番を静かに待っているかのように、その銀色の機体を輝かせていた。現実の課題を抱えながらも、ヒューマノイドロボットが向かう先——人間と共に働き、人間の能力を拡張する未来——は、この日の会場に集まった全員の目に、少しずつ具体的な輪郭を持ち始めていた。
LIF Tech解析——ヒューマノイドロボット開発から見えてきた3つの核心
- 「今すぐ始める」が最大の競争優位:Optimus・Atlasが「将来」を語る中、Unitreeは「今ここで動く実機」を提供する。深層強化学習・模倣学習の知見は蓄積に時間がかかる。1年の先行は将来3年の差になり得る。Goldman Sachsが予測する2035年の1,540億ドル市場を見据えたとき、今この瞬間のデータ・知見・人材の蓄積が将来の競争力を決定する。
- AIの力は「データ収集の質」で決まる:模倣学習の精度はテレオペレーションデータの量と質に依存する。Mobile Alohaが証明した「50回の高品質な手本」という少数精鋭のデータ設計こそが次の競争優位になる。VRゴーグルやモーションキャプチャーグローブが「ロボット教師の最重要ツール」になる時代が到来した。
- ヒューマノイドは「汎用ロボット」への布石:ヒューマノイドの実用化が遅れても、深層強化学習・模倣学習の知見は産業用ロボットアームや協働ロボットに転用できる。バッテリー・安全性・ハンドという3つの課題が解決される前でも、「AIベースのロボット制御技術」そのものに投資する価値は十分ある。今この瞬間の開発投資は確実にリターンする。
LIF Techではこの領域の実務事例を今後も発信していきます。
取材・執筆:Yusuke(株式会社LIFRELL 代表取締役)|取材:2026年1月・東京ビッグサイト ロボデックス2026|本記事は登壇者の発言の意訳・要約を含む。製品スペックや価格は変更される可能性がある。Unitree・TechShareの各種商標は各社に帰属する。
